A Closure-loop Cable-Driven Robotic Tail
This work presents the development of a new robotic tail based on a novel cable-driven universal joint mechanism. The novel joint mechanism is synthesized by geometric reasoning to achieve the desired cable length invariance property, wherein the mechanism maintains a constant length for the driving cables under universal rotation. This feature is preferable because it allows for the bidirectional pulling of the cables which reduces the requisite number of actuators. After obtaining this new joint mechanism, a serpentine robotic tail with fewer actuators, simpler controls, and a more robust structure is designed and integrated. The new tail includes two independent macro segments (2 degrees of freedom each) to generate more complex shapes (4 degrees of freedom total), which helps with improving the dexterity and versatility of the robot. In addition, the pitch bending and yaw bending of the tail are decoupled due to the perpendicular joint axes. The kinematic modeling, dynamic modeling, and workspace analysis are then explained for the new robotic tail. Three experiments focusing on statics, dynamics, and dexterity are conducted to validate the mechanism and evaluate the new robotic tail’s performance.
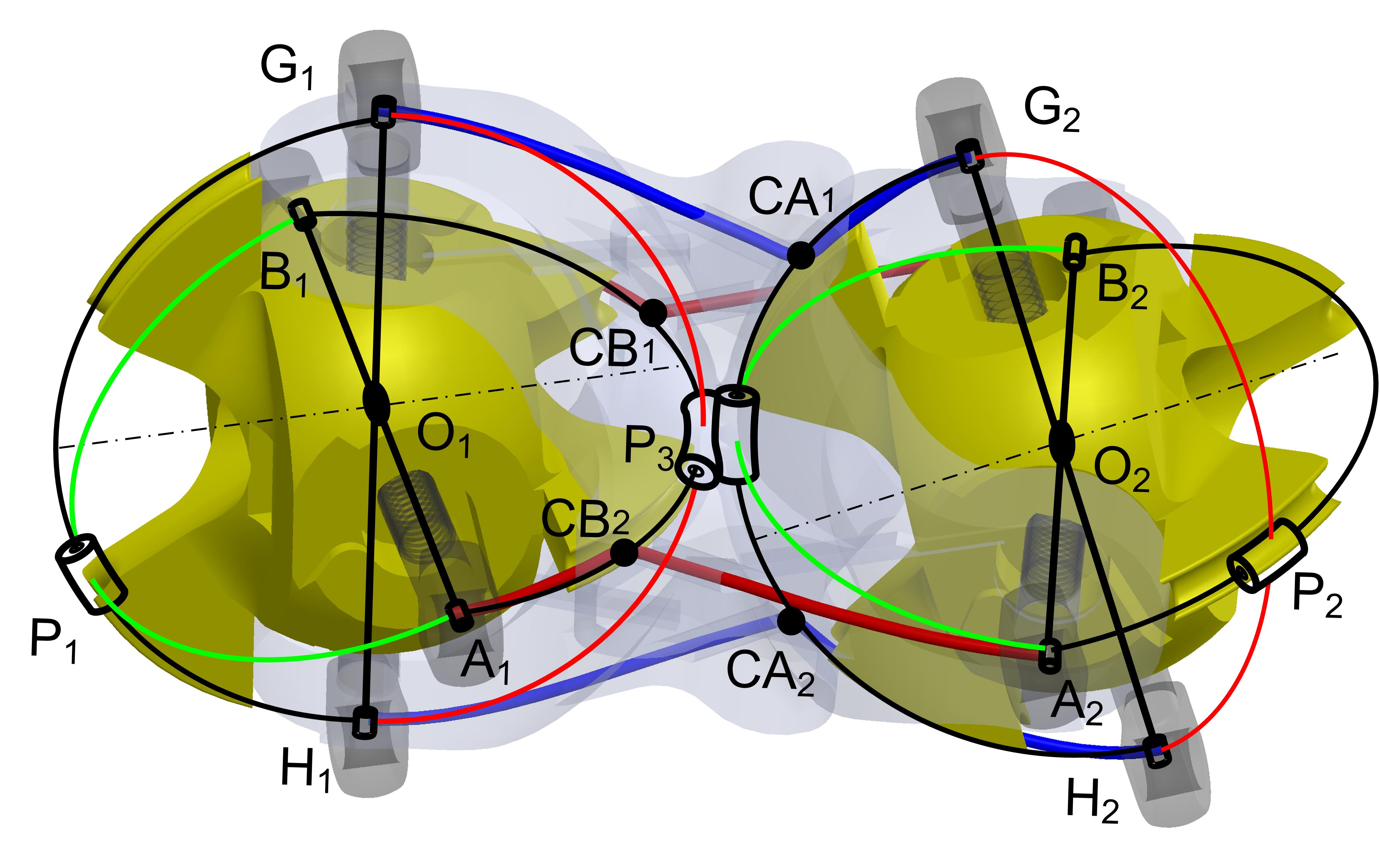
The mechanism principle is illustrated below:
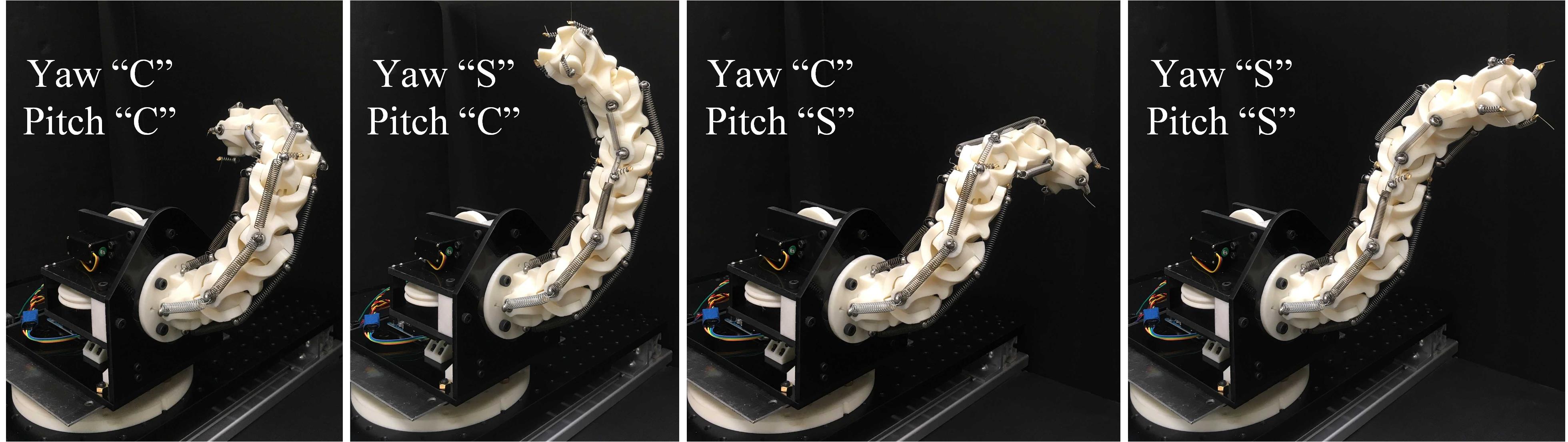
And a proof-of-concept prototype:
Related Publications:
Liu, Y., Wang, J. and Ben-Tzvi, P., 2019, “A Cable Length Invariant Robotic Tail Using a Circular Shape Universal Joint Mechanism”, Journal of Mechanisms and Robotics, Transactions of the ASME, 11(5), p. 051005. 