Legged Robots with Serpentine Tails
Our research path on this direction mainly consists of two branches: one theoretical branch that focuses on using dynamics and control theory to understand the tail-involved legged locomotion problem, and one empirical branch that focuses on developing legged robots with a serpentine robotic tail and using hardware to practically verify the theoretical findings. We have proposed that with a serpentine robotic tail onboard, the legged robot may be able to perform some unique functionalities.
At present, on the theoretical side, we have created general dynamic models for both the quadruped and biped cases, with either an articulated tail or a continuum tail. We have also developed motion controllers based on the classical feedback linearization-based control and the numerical optimal control, to coordinate the leg motion and the tail motion. Some of the simulations are shown here.
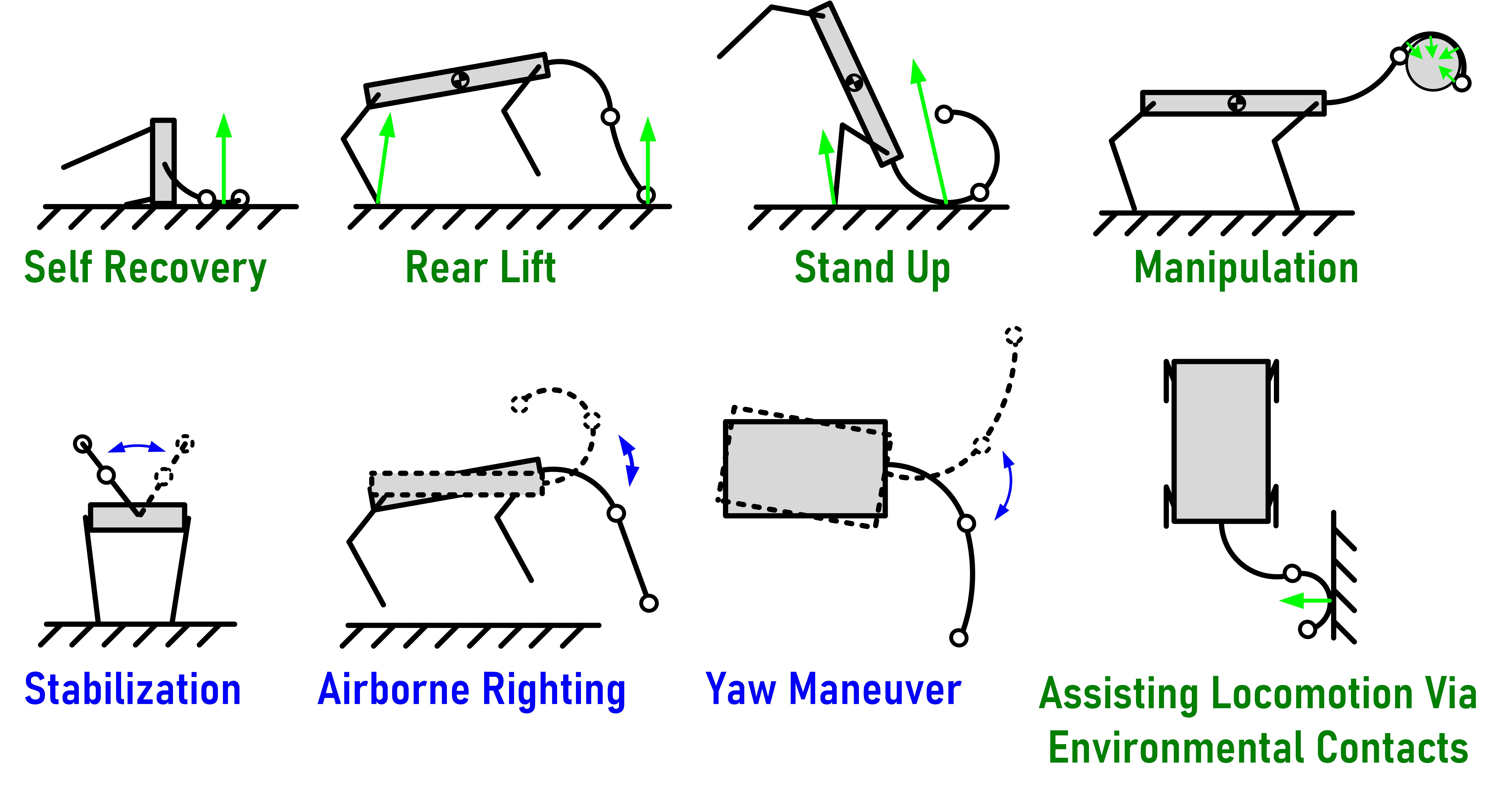
For bipedalism (using a kangaroo rat model as an example), a serpentine tail is controlled to help the kangaroo rat to adjust its airborne posture, stabilize its locomotion through environmental contacts, and recover itself from falling.
For quadrupedalism (using a reduced complexity quadruped robot VT Lemur as an example), a serpentine tail is controlled to help the quadruped robot to change its heading direction (yaw maneuvering) and to assist its locomotion through environmental contacts.
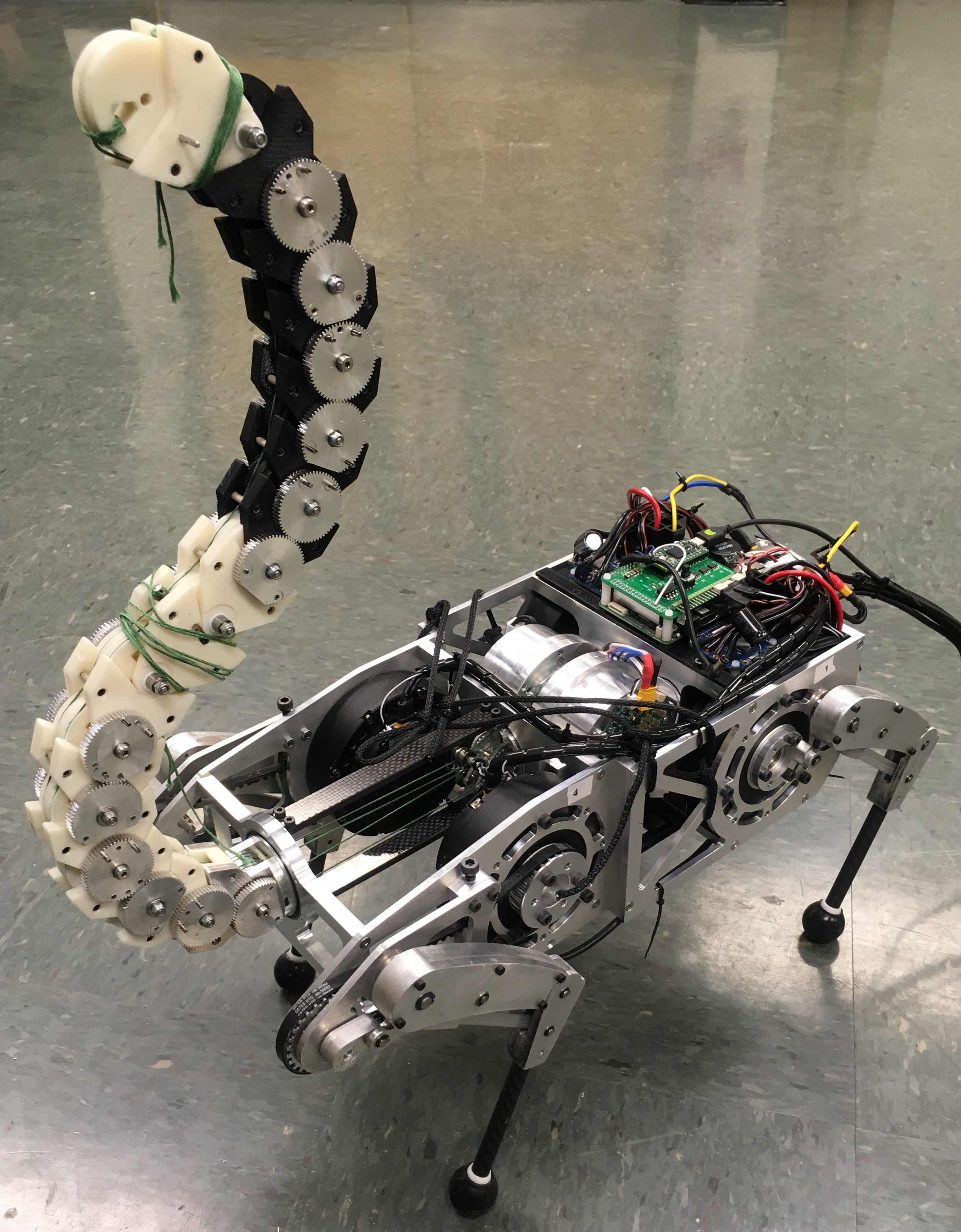
On the empirical side, we have also developed several hardwares, including robotic tails (see the RML Tail and the Rigitail) and quadruped robots. Here shows one reduced complexity quadruped robot (RCQ robot for short) before integrating a robotic tail,
and the VT Lemur robot with the Roll-Revolute-Revolute Robotic Tail (a.k.a. R3RT) integrated onboard.
Related Publications:
Liu, Y. and Ben-Tzvi, P., 2023, “How a Serpentine Tail Assists Agile Motions of Kangaroo Rats: A Dynamics and Control Approach”, Nonlinear Dynamics, 111(16), pp. 14783-14803. 
Pressgrove, I., Liu, Y. and Ben-Tzvi, P., “Design and Implementation of a Power-Dense, Modular, and Compact Serpentine Articulated Robotic Tail”, Proceedings of the ASME 2022 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference (IDETC/CIE2022), 46th Mechanisms & Robotics Conference, St. Louis, MO, USA, August 14-17, 2022, p. V007T07A053.
Liu, Y. and Ben-Tzvi, P., “Systematic Development of a Novel, Dynamic, Reduced Complexity Quadruped Robot Platform for Robotic Tail Research”, 2022 IEEE International Conference on Robotics and Automation (ICRA), Philadelphia, PA, USA, May 23-27, 2022, pp. 4664-4670.
Ben-Tzvi, P. and Liu, Y., 2021, “Robots With Tails”, ASME Mechanical Engineering Magazine, 143(6), pp. 32-37. [Magazine Article]
Liu, Y. and Ben-Tzvi, P., “Feedback Control of the Locomotion of a Tailed Quadruped Robot”, Proceedings of the ASME 2021 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference (IDETC/CIE2021), 45th Mechanisms & Robotics Conference, Virtual, Online, Aug. 17-20, 2021, p. V08BT08A009.
Liu, Y. and Ben-Tzvi, P., 2021, “Dynamic Modeling, Analysis, and Design Synthesis of a Reduced Complexity Quadruped with a Serpentine Robotic Tail”, Integrative and Comparative Biology, 61(2), pp. 464–477.
Liu, Y. and Ben-Tzvi, P., 2021, “Dynamic Modeling, Analysis, and Comparative Study of a Quadruped with Bio-inspired Robotic Tails”, Multibody System Dynamics, 51(2), pp. 195-219.
Liu, Y. and Ben-Tzvi, P., 2020, “An Articulated Closed Kinematic Chain Planar Robotic Leg for High Speed Locomotion”, Journal of Mechanisms and Robotics, Transactions of the ASME, 12(4), p. 041003.
Rone, W., Liu, Y. and Ben-Tzvi, P., 2019, “Maneuvering and Stabilization Control of a Bipedal Robot with a Universal-Spatial Robotic Tail”, Bioinspiration & Biomimetics, 14(1), p. 016014.
Liu, Y. and Ben-Tzvi, P., “Dynamic Modeling of the Quadruped with a Robotic Tail Using Virtual Work Principle”, Proceedings of the ASME 2018 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference (IDETC/CIE2018), 42nd Mechanisms & Robotics Conference, Quebec City, Canada, Aug. 26-29, 2018, p. V05BT07A021.