Research Summary
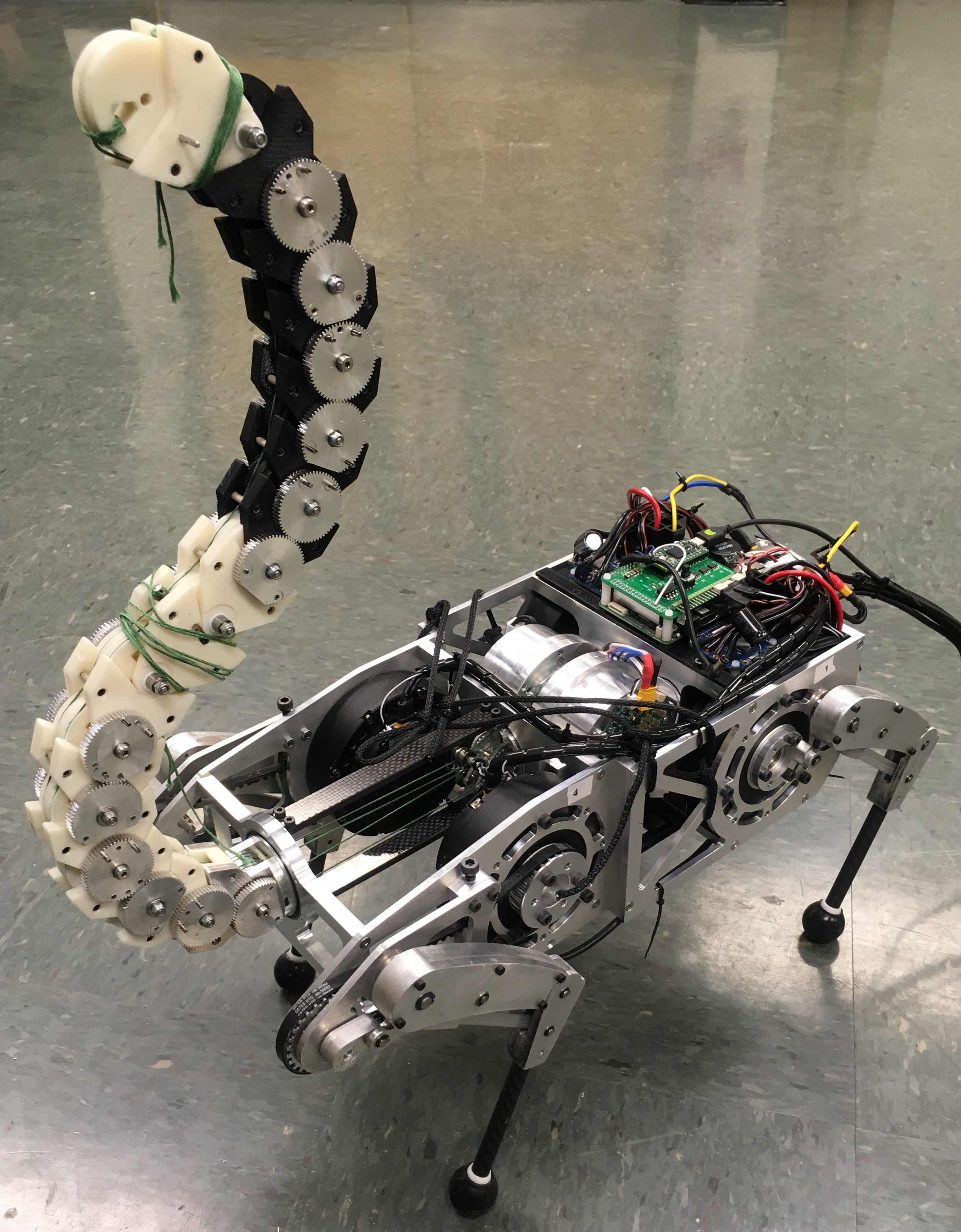
Using Serpentine Robotic Tails to Enhance the Agility, Dexterity, and Versatility of Legged Robots
This research is inspired by the biological observations that animals frequently use their serpentine tails to enhance the agility, dexterity, and versatility of their motions, such as those exhibited by monkeys, cheetahs, kangaroo rats, etc. The ultimate goal of this research is to understand the fundamental principles behind these observations and apply the findings to robotics. This includes answering three key questions: (1) what are the functionalities of the serpentine tail on legged locomotion? (2) how do the animals control their tail motion? and (3) how could we learn from these findings and enhance the agility, dexterity, and versatility of existing legged robots? Read more on the full story
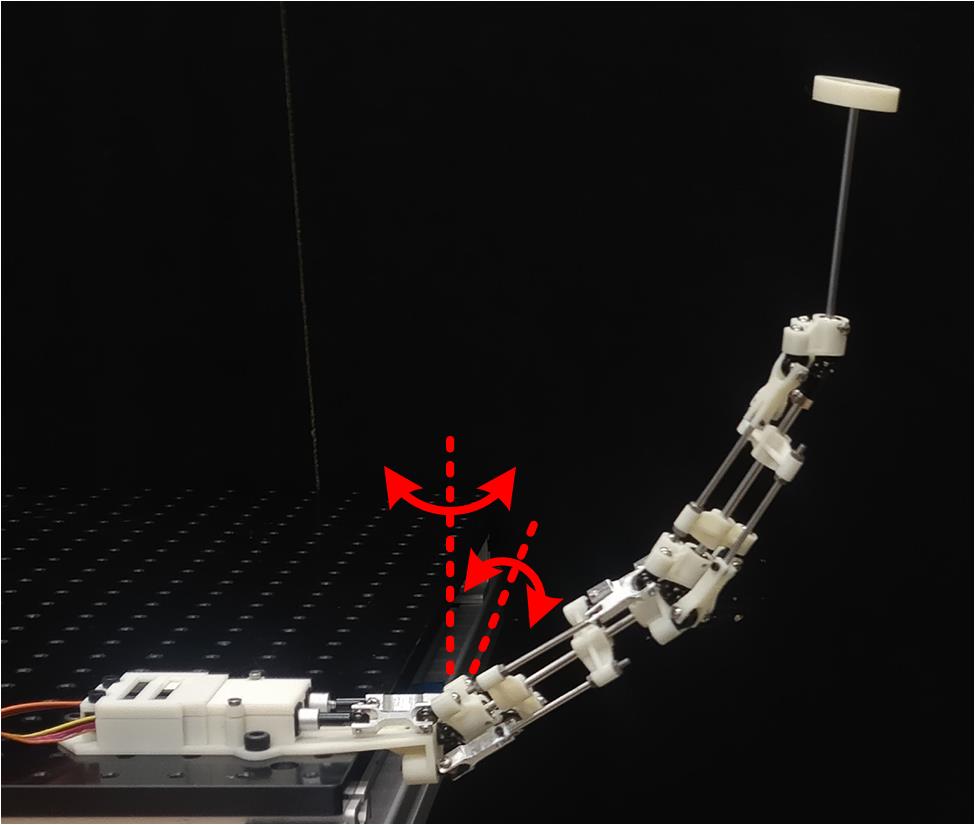
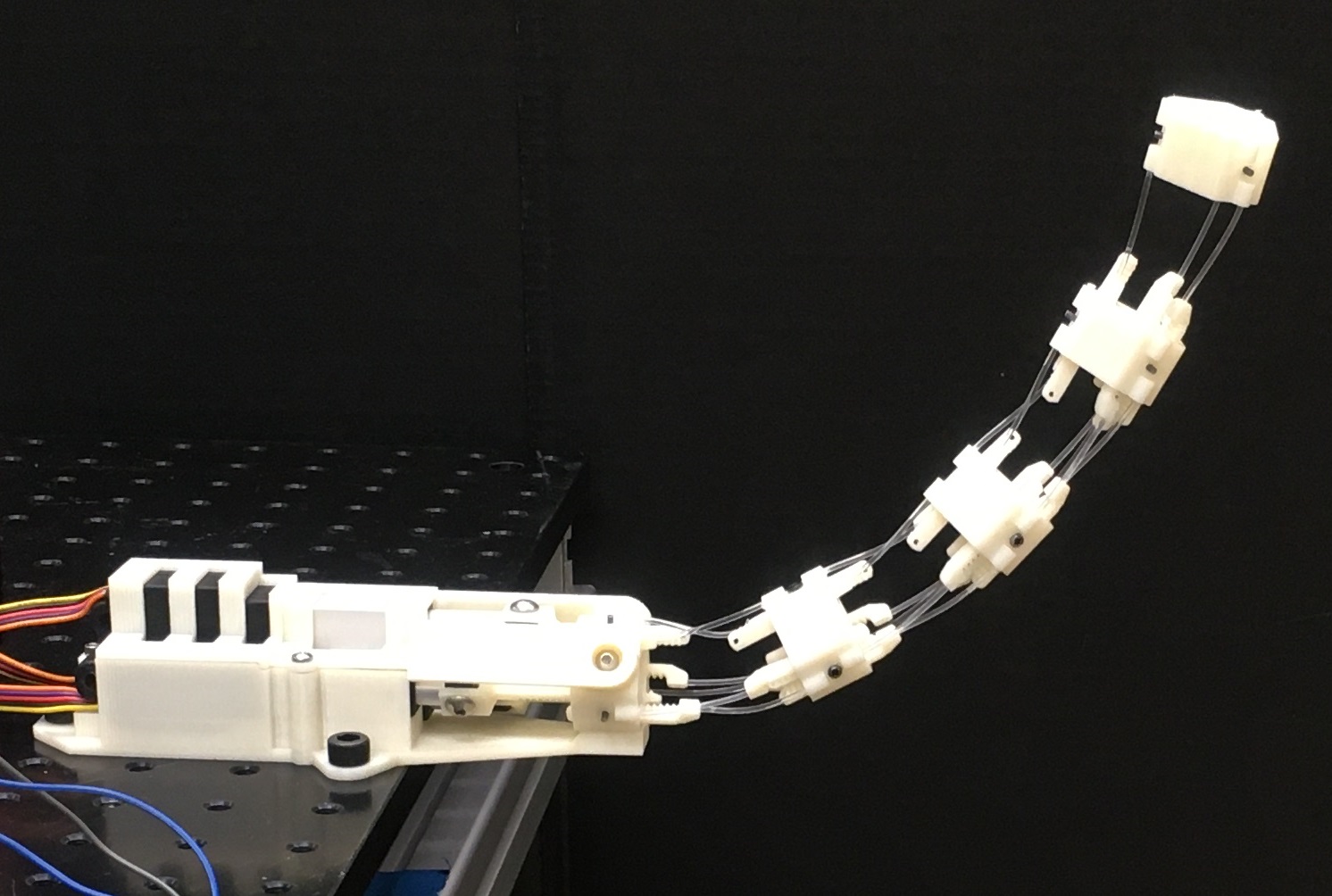
Developing Novel Tail-like Mechanisms
As byproducts of the serpentine tail research, I have proposed several tail-like mechanisms which may have potential applications in medical robotics. Please click on the image to read more.

Developing Novel Robotic Exoskeleton Gloves
I have also contributed to the mechanism design of novel low-profile robotic exoskeleton gloves for patients with brachial plexus injuries. Please click on the image to read more.
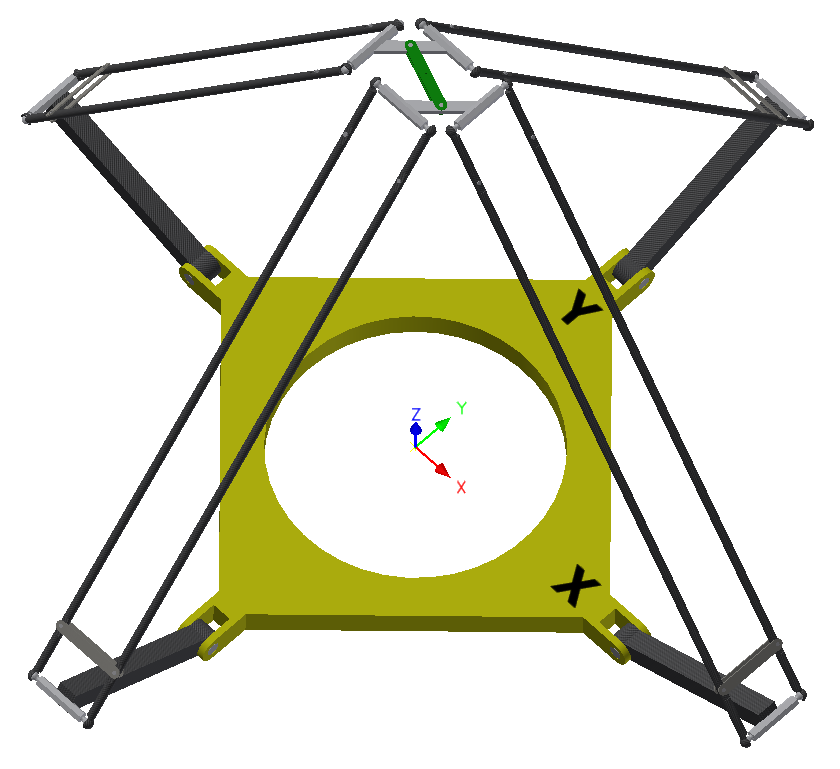
Parallel Mechanism Analysis and Control
I have also worked on the controlling and kinematic analysis of parallel mechanisms. Please click on the image to read more about this work.